
Semiautomatic Weaving Loom
YEAR2024
KINDGROUP
CATEGORYFABRICADEMY
FUNCTIONCODING, DESIGNING AND MANUFACTURING
During this week, we explored the intersection of traditional weaving techniques and modern automation through the creation of a semiautomatic loom. By combining digital fabrication methods with Arduino controlled mechanics, we've developed an accessible approach to textile production using the loom.
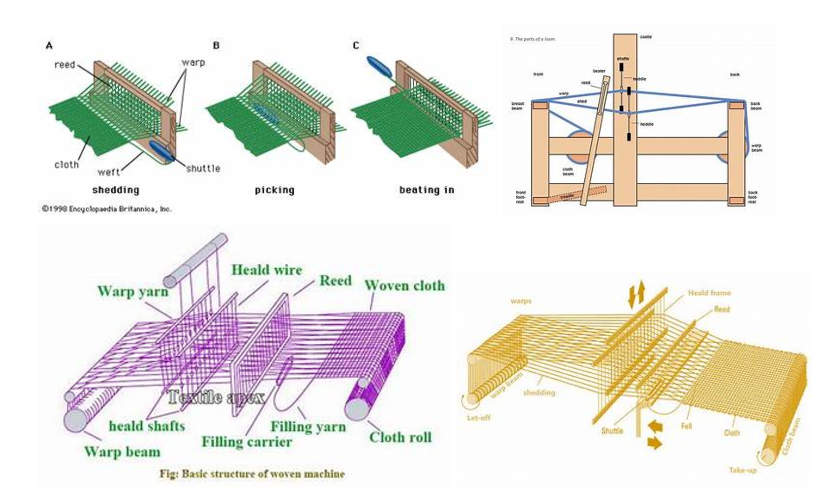
The earliest looms date from the 5th millennium BC and consisted of bars or beams fixed in place to form a frame to hold parallel threads in two sets, alternating with each other. By raising one set of these threads (the warp), it was possible to run a cross thread (the weft) between them. The block of wood used to carry the filling strand through the warp was called the shuttle.


Sits directly on the floor good for larger projects/wider fabrics

A wooden frame that holds warp threads under tension. The weaver manipulates the weft threads by hand.

All you need is a wooden frame, heddles, and a strap that goes around your back. The strap provides the tension to keep the warp threads taut as you weave. The weaver can easily adjust the tension of the warp using their own body, creating an intimate connection with the textile during the weaving process.The weaver uses string heddles and their fingers to create the shed, then passes the weft through. By changing the order of raising warp threads, intricate motifs are achieved

A simple loom for producing basic woven fabrics. Great starter option for weaving. a rectangular frame that sits on a tabletop. The warp threads are attached to the frame, and you pass the weft thread over and under the warp threads by hand. Ideal for making small projects like placemats, towels, and scarves. They’re very portable and easy to set up and operate.

Designed for weaving tapestries and decorative wall hangings with intricate patterns.

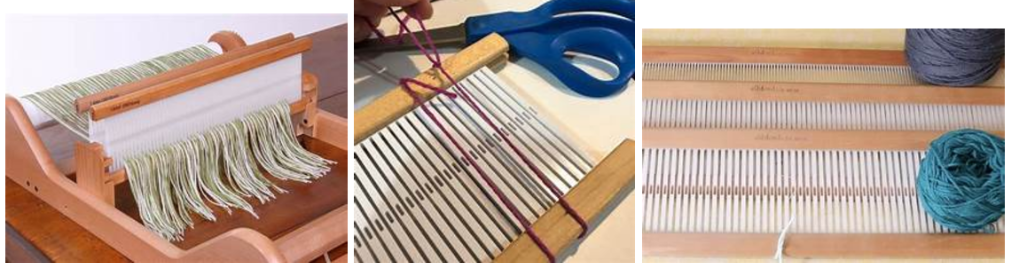
The rigid heddle loom is one of the simplest and most portable looms. It’s a great starter loom for beginners and hobby weavers.Easy to Use,only has two shafts that raise and lower the warp threads to create the shed for the shuttle to pass through. This makes it straightforward to operate and ideal for learning the basics of weaving. All you need to get started is the loom, a shuttle, yarn, and a few other simple tools.
Once you have the warp threaded through the heddles and secured around the beam, you simply pass the shuttle back and forth by hand to weave the weft threads over and under the warp threads. The weaving process moves quickly since there are only two shafts to switch between.

A circular frame with pegs around the edge to hold warp threads. Creates seamless woven pieces. Great for beginners and portable.
The main benefits of a circular loom are: - Creates seamless woven pieces with no edges - Great for beginners since the process is straightforward - Portable and easy to store since the loom can be disassembled - Diverse projects possible, from placemats and baskets to rugs and blankets

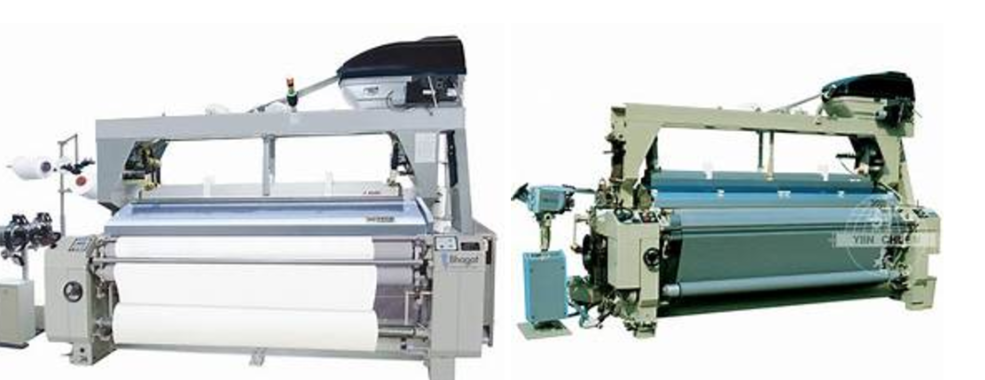
Uses high-pressure air to shoot weft yarn across warp threads at high speeds (up to 1,000 meters per minute). Produces high-quality fabrics like denim and bed sheets.

Uses water jets to pass the weft yarn through the warp. Best for light to medium-weight fabrics like shirting and upholstery.
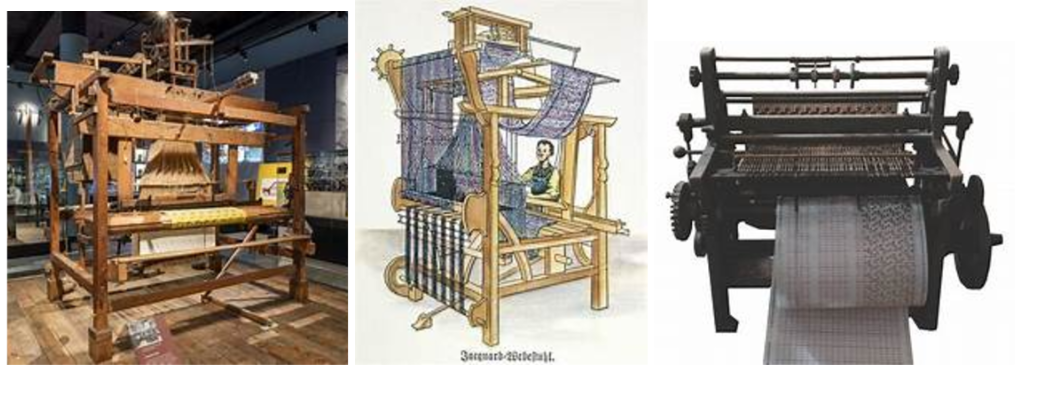
The Jacquard loom is a mechanical loom that uses punched cards to control the pattern being woven.
The Jacquard loom uses a chain of punched cards connected into a continuous loop. As the cards pass over the loom, they control the pattern being woven by raising and lowering the warp threads. The holes in the cards determine which threads are raised and lowered, allowing complex patterns to be woven quickly and efficiently.
Uses a mechanical dobby head to control warp threads, allowing for intricate patterns.

Traditional looms that use a shuttle to pass the weft yarn. Produces high-quality fabrics but requires skilled labor.

Use air or water jets to propel the weft yarn. Faster and more efficient but limited to simpler patterns.

As we explored the concept of a weaving loom, it quickly became clear how complex and intricate the process really is. At first, understanding how all the components worked together felt almost impossible. Fortunately, our local instructor shared references from past years’ alumni, which became very helpful to us.
Thanks to those references, we gained a deeper understanding and felt more confident moving forward. It was like having a guide that helped us navigate what initially felt like uncharted territory.

| Material | Online Source | Price Range | Barcelona Supplier | Local Supplier Link | Estimated Cost |
|---|---|---|---|---|---|
| 25 mm Round Wood Sticks | Amazon - Wood Dowels | €10–€25 | Top Timber | Top Timber | €17.50 |
| 1x1m CNC-Milled Plywood | Bricodepot | €20–€35 | HachAzuela | HachAzuela | €27.50 |
| 6 mm Acrylic Sheets | Ferplast | €15–€30 | Ferplast | Ferplast | €22.50 |
| 4 mm MDF Sheet | Leroy Merlin | €8–€15 | Ferretería Ramírez | Ferretería Ramírez | €11.50 |
| Micro Servo Motors (5 pcs) | AliExpress | €12–€20 | BCN Robotics | BCN Robotics | €16.00 |
| UNO R3 Board | Arduino Store | €10–€25 | BCN Robotics | BCN Robotics | €17.50 |
| Breadboard | Amazon - Breadboard | €10–€15 | BCN Robotics | BCN Robotics | €12.50 |
| Connection Cables | RS Components | €8–€12 | BCN Robotics | BCN Robotics | €10.00 |
| 3D-Printed PLA Pieces | Custom (in class) | ~€20/kg (PLA) | HachAzuela (Custom orders possible) | HachAzuela | €2.00* |
| Sandpaper (Various Types) | Brico Depôt | €3–€10 | Leroy Merlin | Leroy Merlin | €6.50 |
Total Estimated Cost: €143.00
*This value should be taken just as a reference as prices may vary depending on the city
We were working as a team of three, myself and Liz, and Neyla, two Fabricademy students
At first it took us a while to understand how a weaving loom works, it wouldn't have been possible without Liz's knowledge and one of the Cora's help, as they have knowledge and experience using it as for Neyla and myself it was the first time ever that we used a machine like that! It was also very helpful that there were two samples from past years students, Doing some lines of weaving to completely fully understand how it works and how we could improve the machine!
Finally, the idea was to divide the heddle in pieces, a few at first (4), and integrate robotics to it, so the two pieces in between of the fourth would move differently automatically following the instructions from the Arduino Code, now with a starting point and a north to follow, it was time to get hands on in fabrication!!!
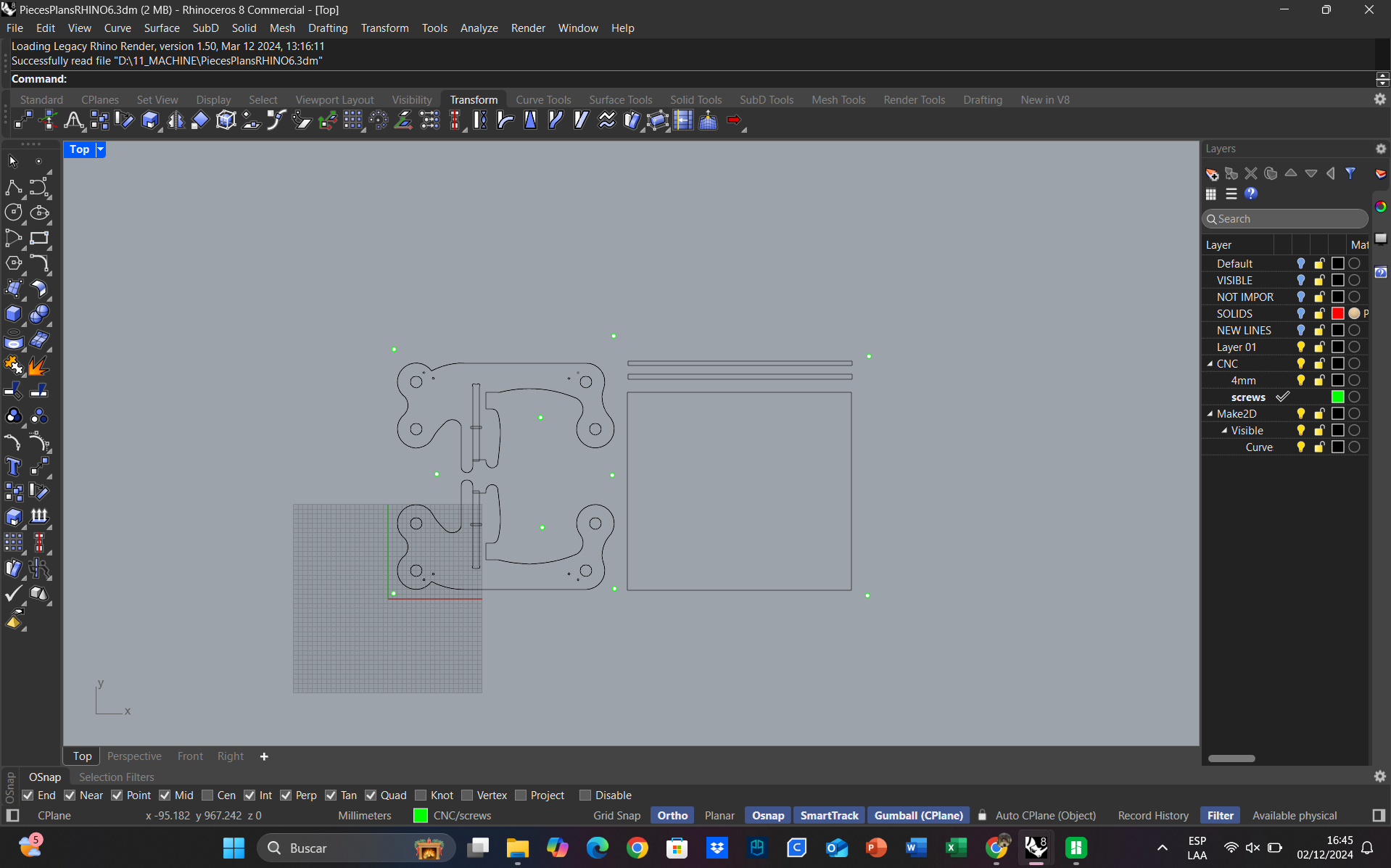
Rhino design of the loom pieces that will be a part of the base functionality of the loom, they will be added as the heald frame. The four shorter strips with holes will be added to either side of the acrylic heddle shaft at the top and the bottom making a two sided frame. The holes are where the screws will go to allow the heddlel shaft movement.
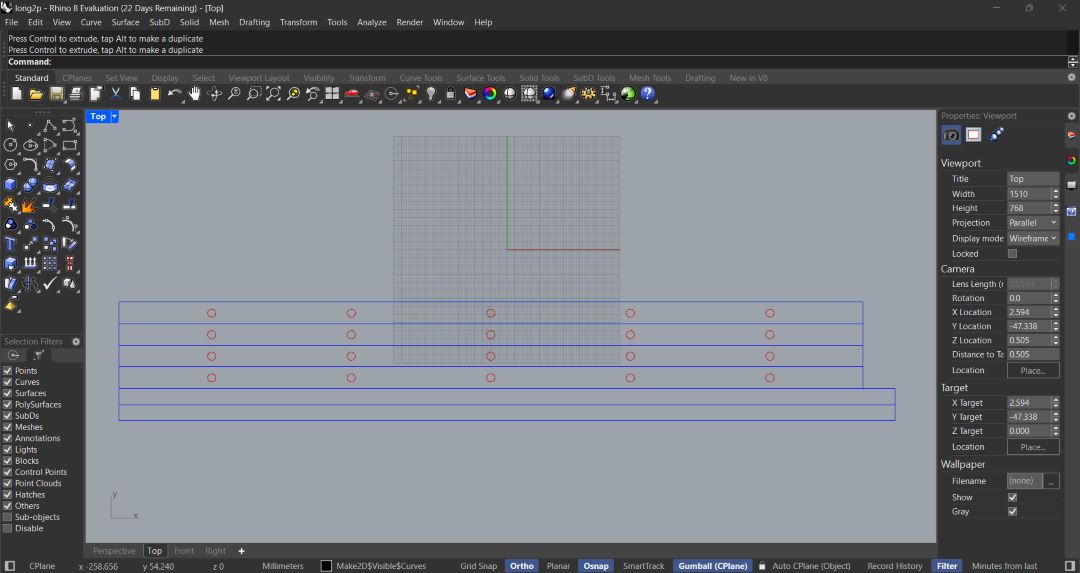
This rhino model is the heddle shaft, which is the inside portion of the heddle frame. This is a standard heddle frame, the same as the 3D model used by our example in class which we used as our starting point. We mocked this model on rhino and laser cut it to test our loom and see if our idea was feasible.
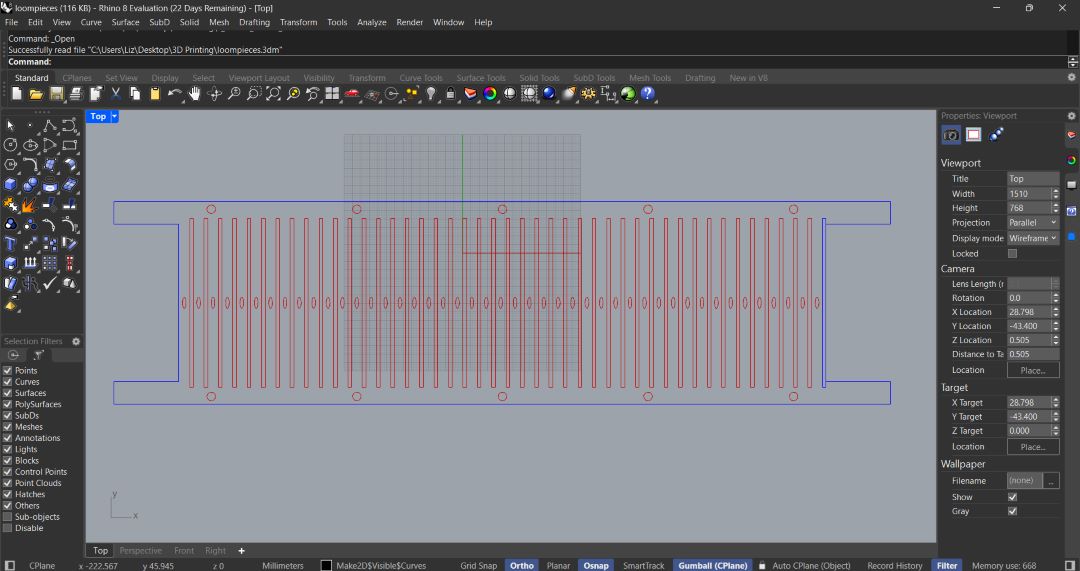
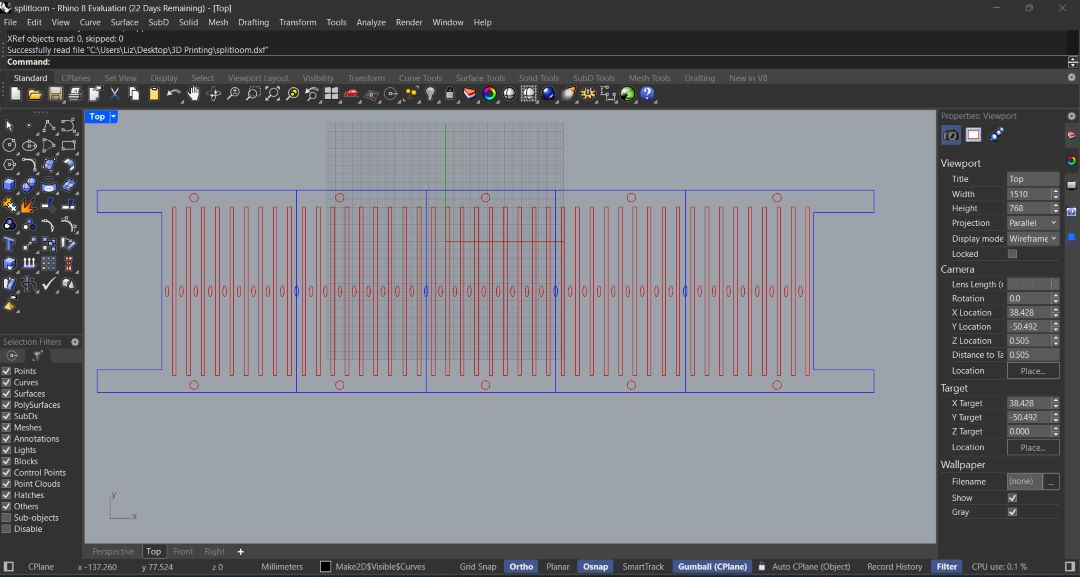
Expanding on the Rhino design from the first heddle shaft above, to enhance this loom we needed to make a few updates. We spit the shaft into five separate sections that will later be attached to five separate motor pears. The DXF file was exported to be laser cut on a 5mm acrylic sheet. These five pieces will be sandwiched into the heddle frames which are also cut
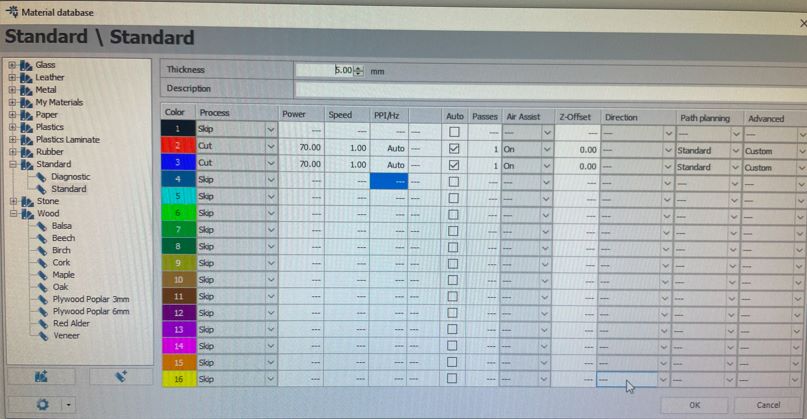
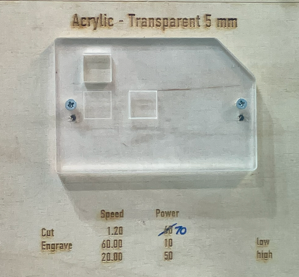
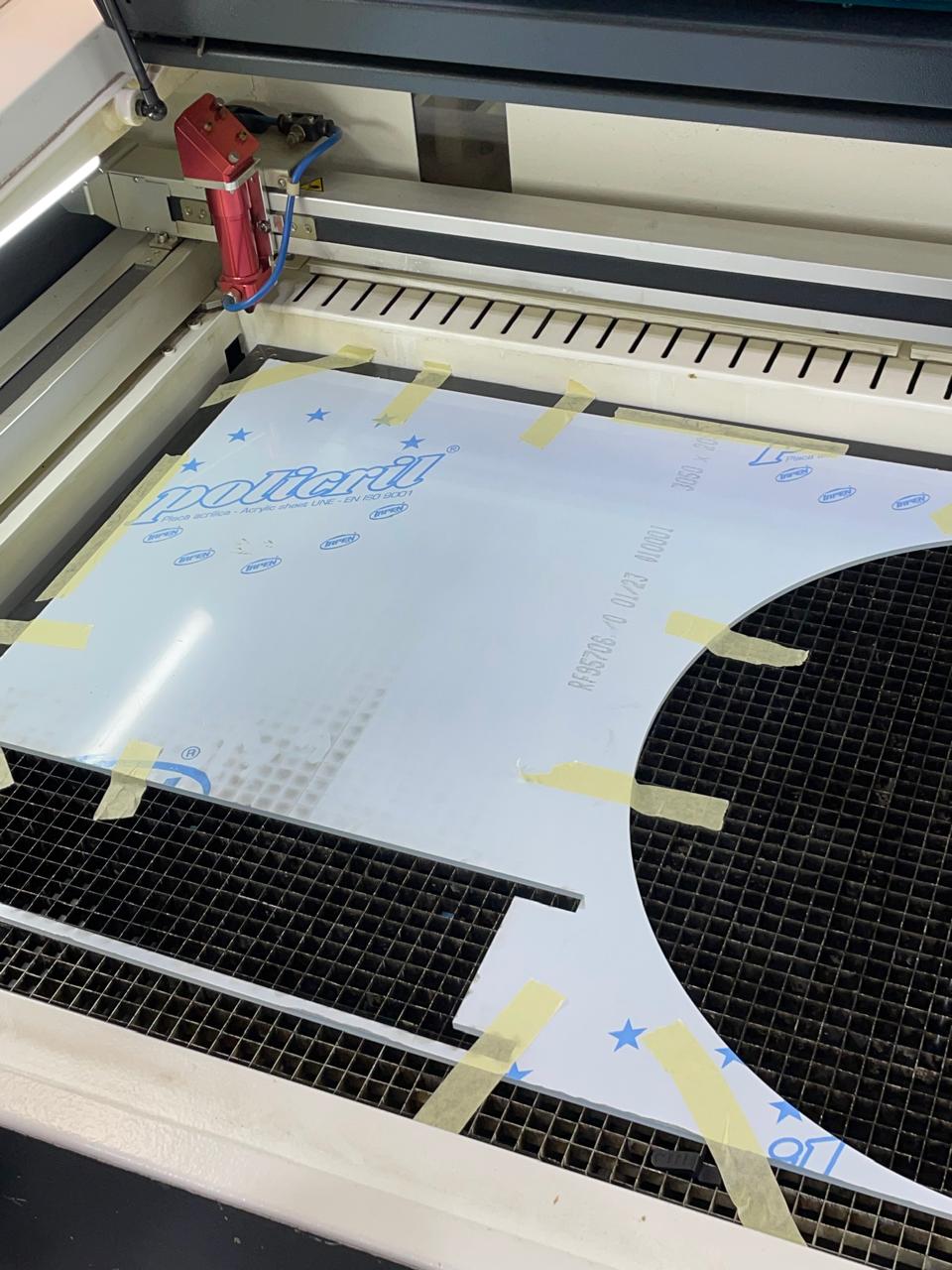
Laser cutting settings for the 5mm acrylic transparent sheet. Marianna recommended to instead change the settings to Standard Material on 70% power and 1.00 speed, after testing on a small section of the acrylic, we agreed this was the best option and it cut perfectly.
Laser cutting settings for 4mm wood. These settings were fine, they cut the outside pieces but not the screw holes, we don’t think this will be an issue because we will be screwing through anyways so we will first put a drill hole instead of reprinting the pieces so we are not wasting as much material.

We had to re design the machine to make a rail where the heddles would slide to make it more stabble, so we decided to go with CNC Milling to build the whole new designed structure of the machine. So this is how it went:
First, we made the design in Rhinoceros 3D:
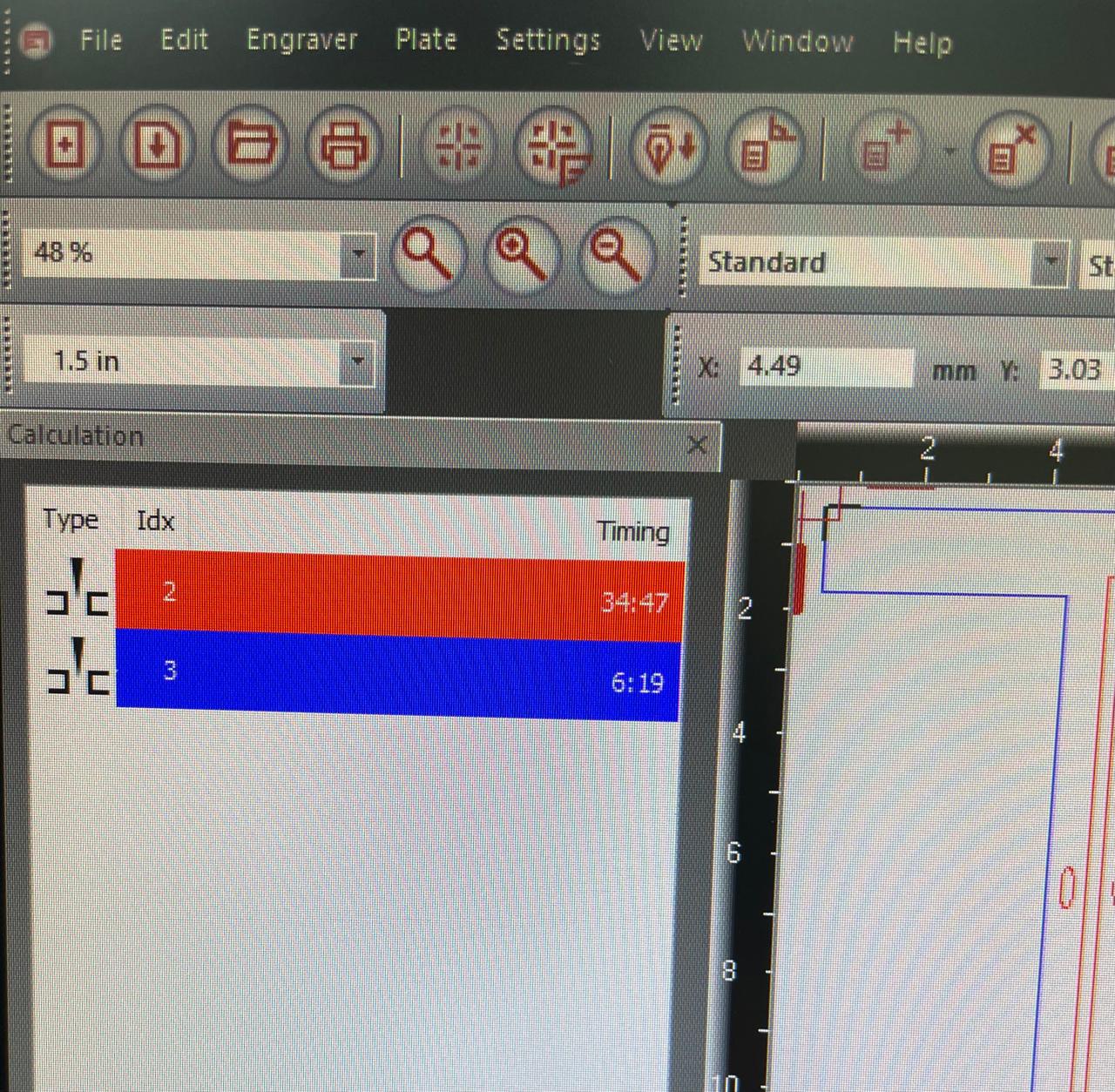
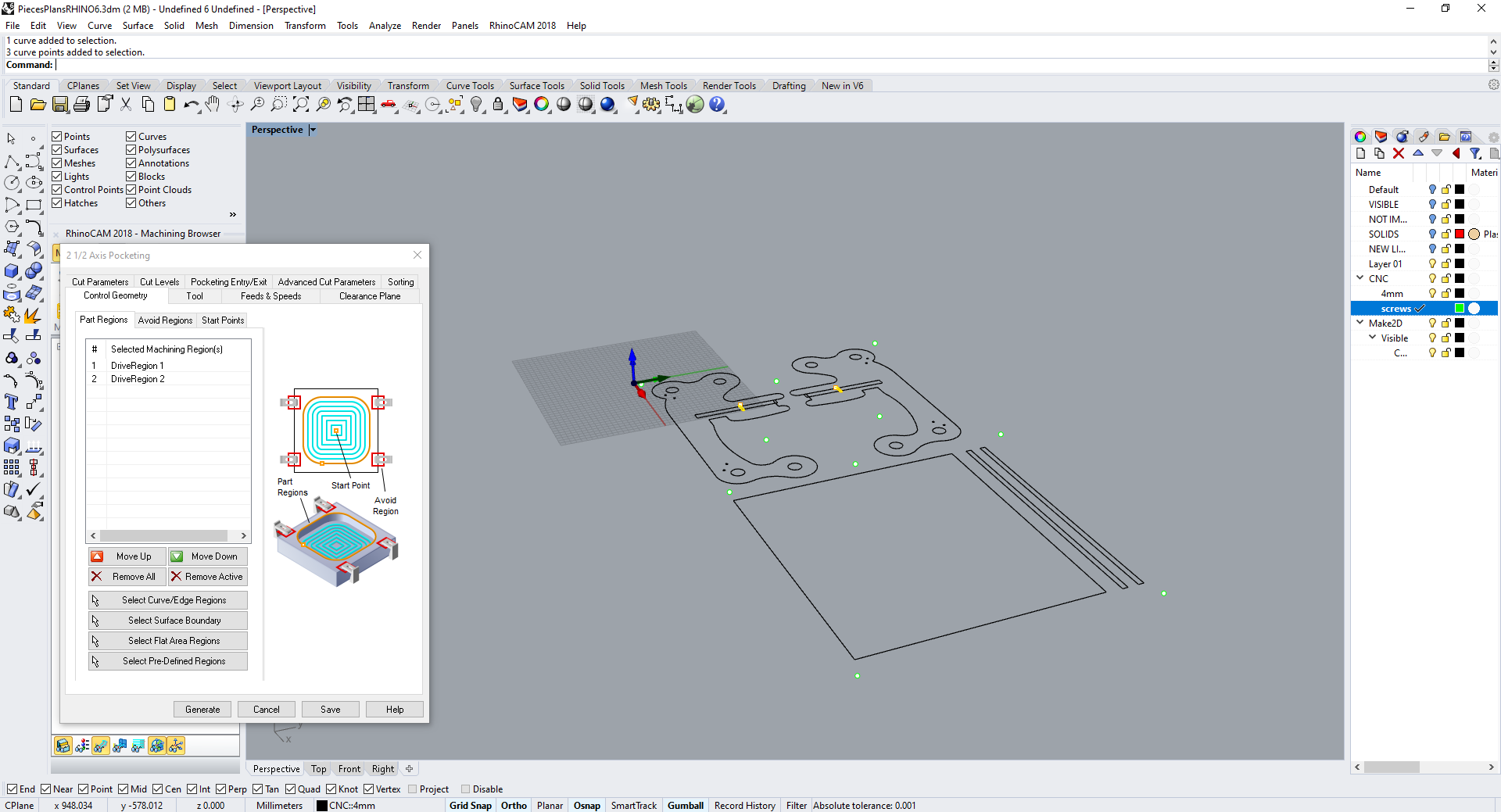
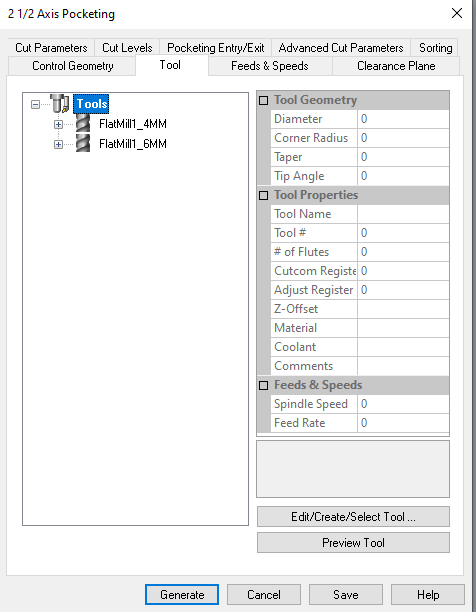
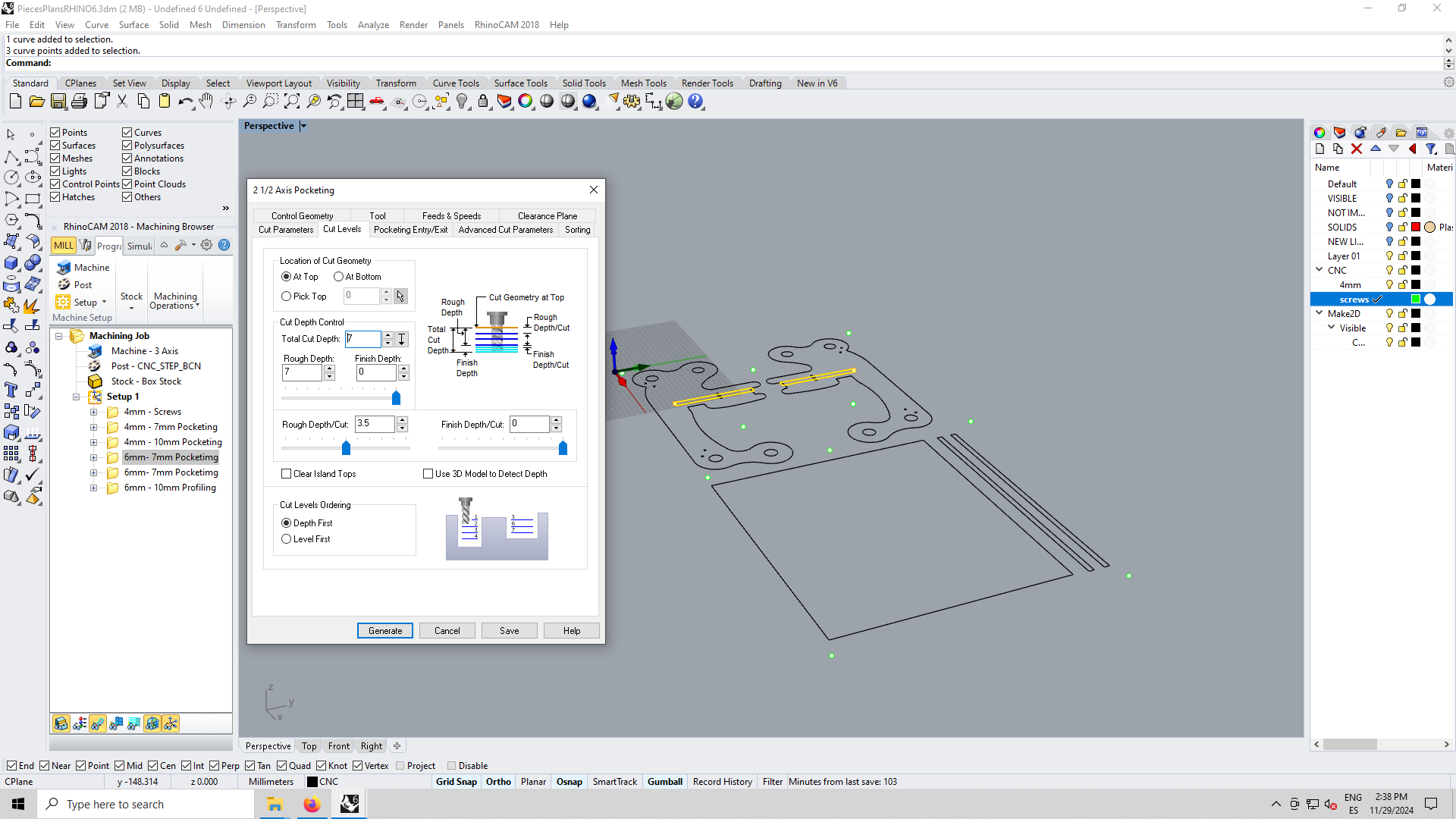
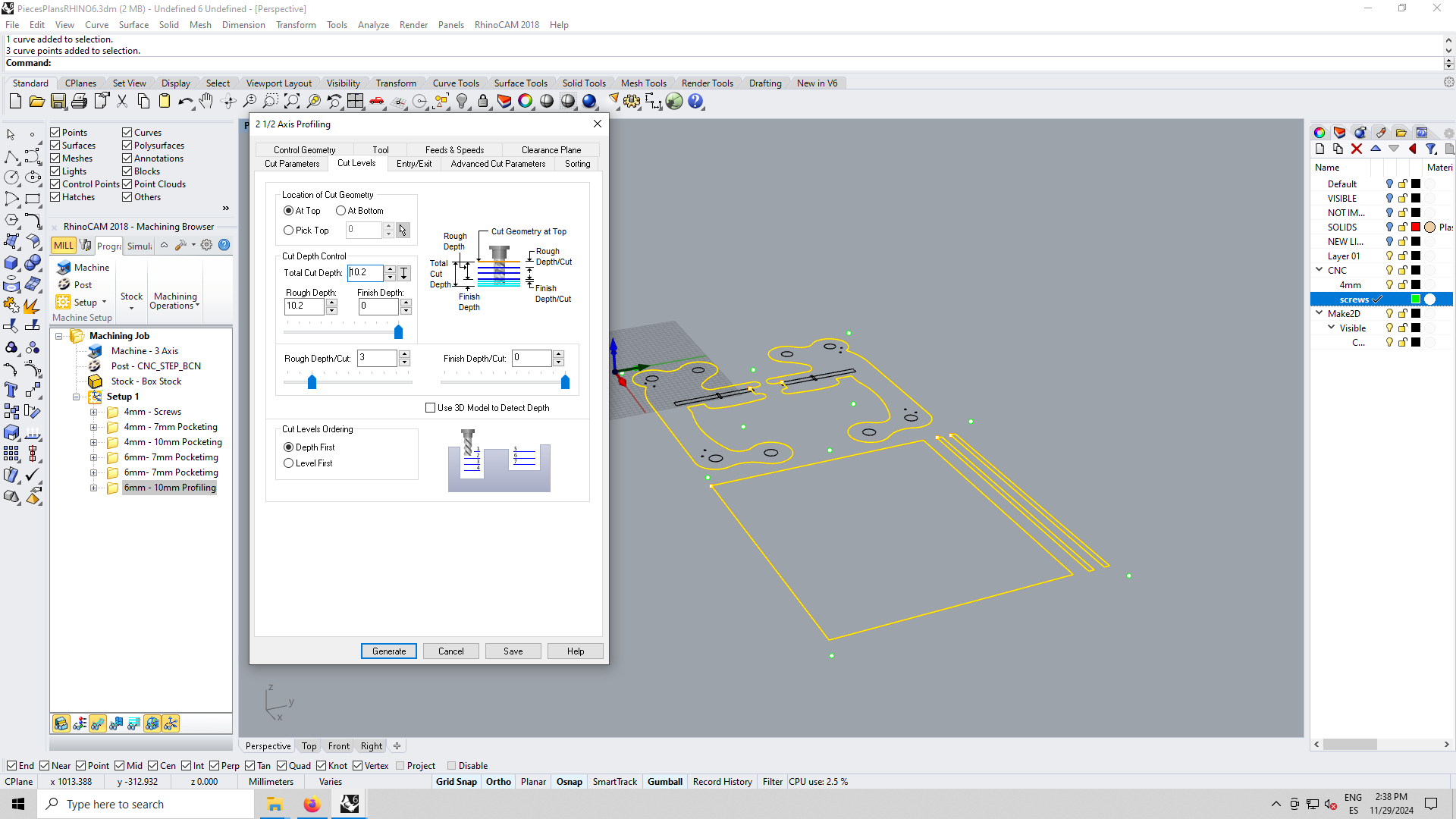
Second, we make the RhinoCAM settings Here are some of the main settings and the different cutting depths used.
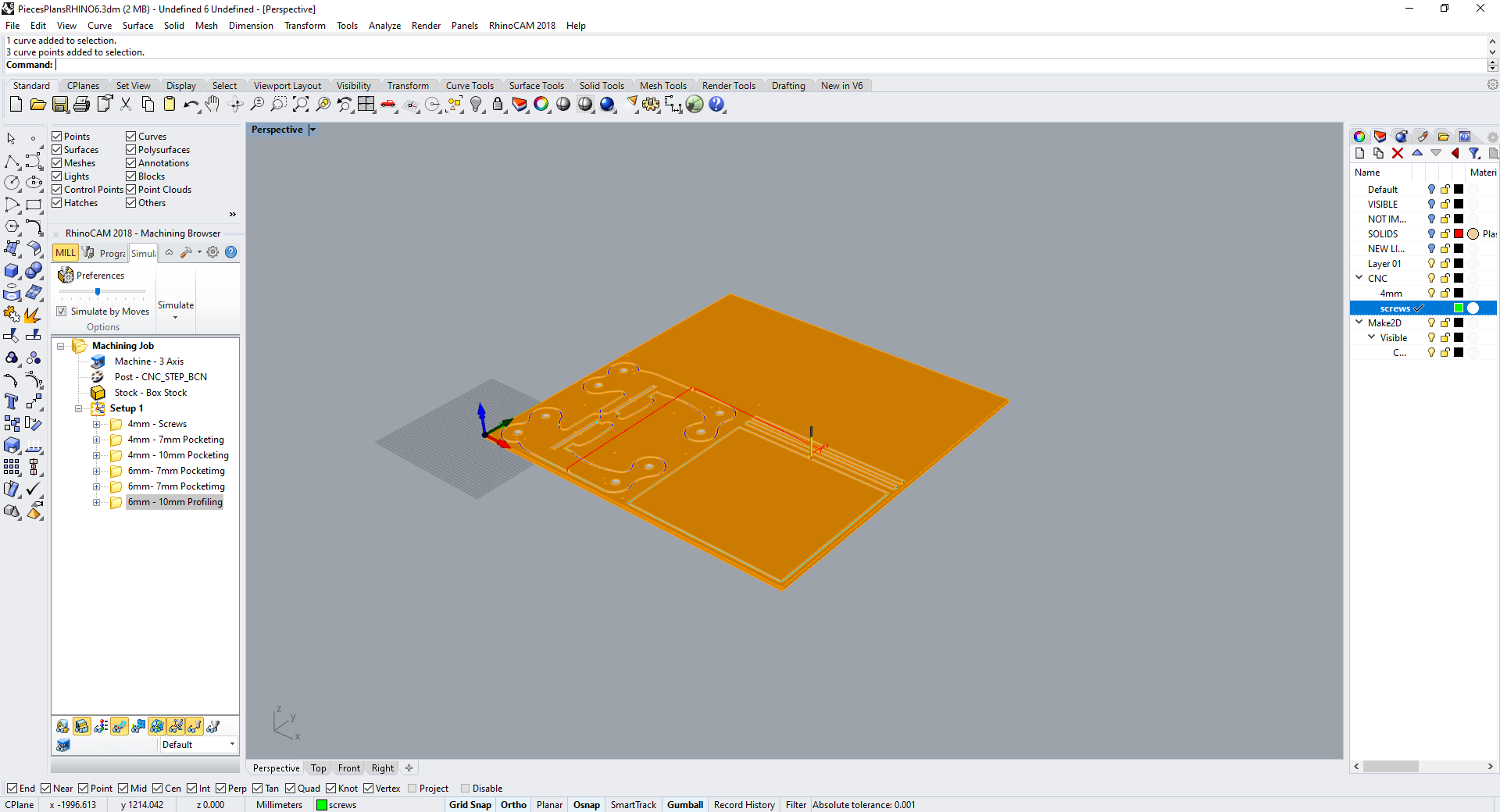
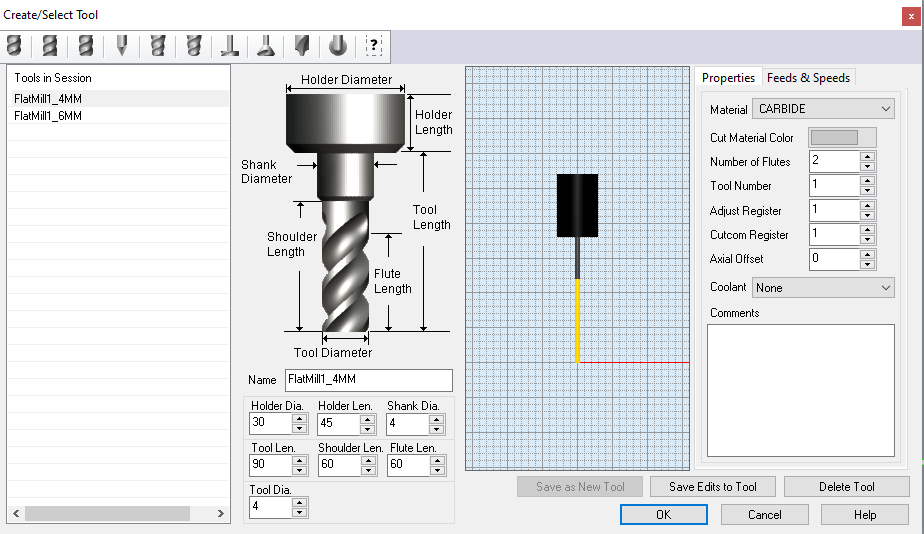
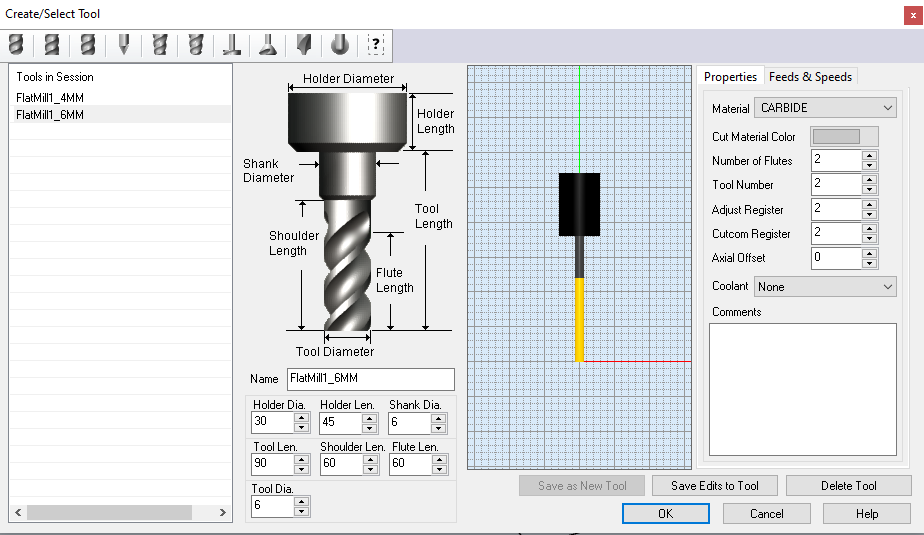
Third, we set the machine and changed the drill as we were working at first with 4mm drill for the small holes and 6mm for the general cut of the shape. So it sent like this:
1. 4mm drill - the machine marks the screws to fix the plywood plank so it wouldn't move while cutting
2. 4mm drill - the machine makes the small holes for the screws that hold the structure together and also the small parts that would help hold the heddle
3. 6mm drill - the machine cuts and empties the whole structure following the design



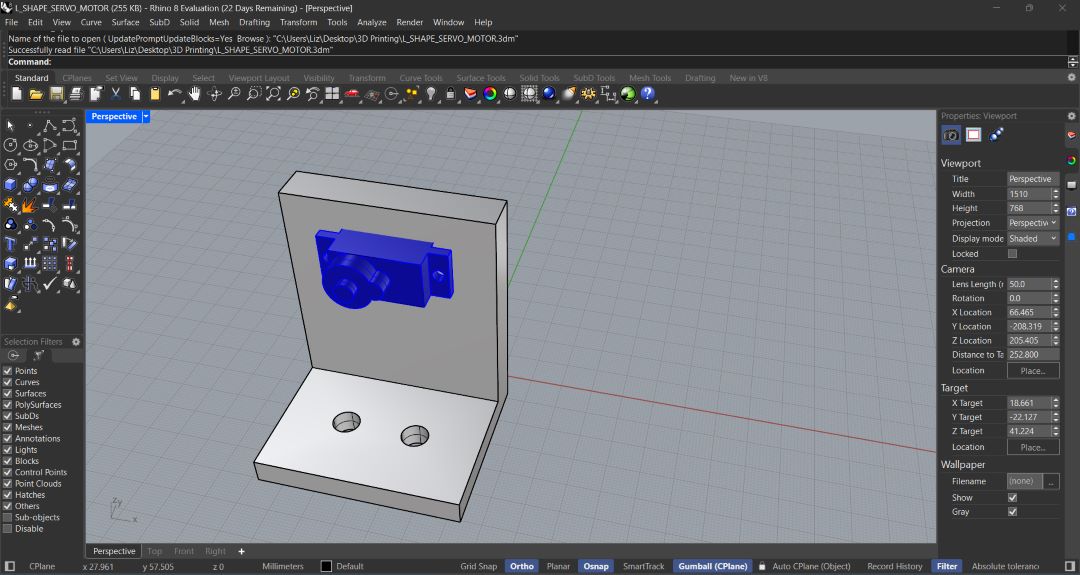
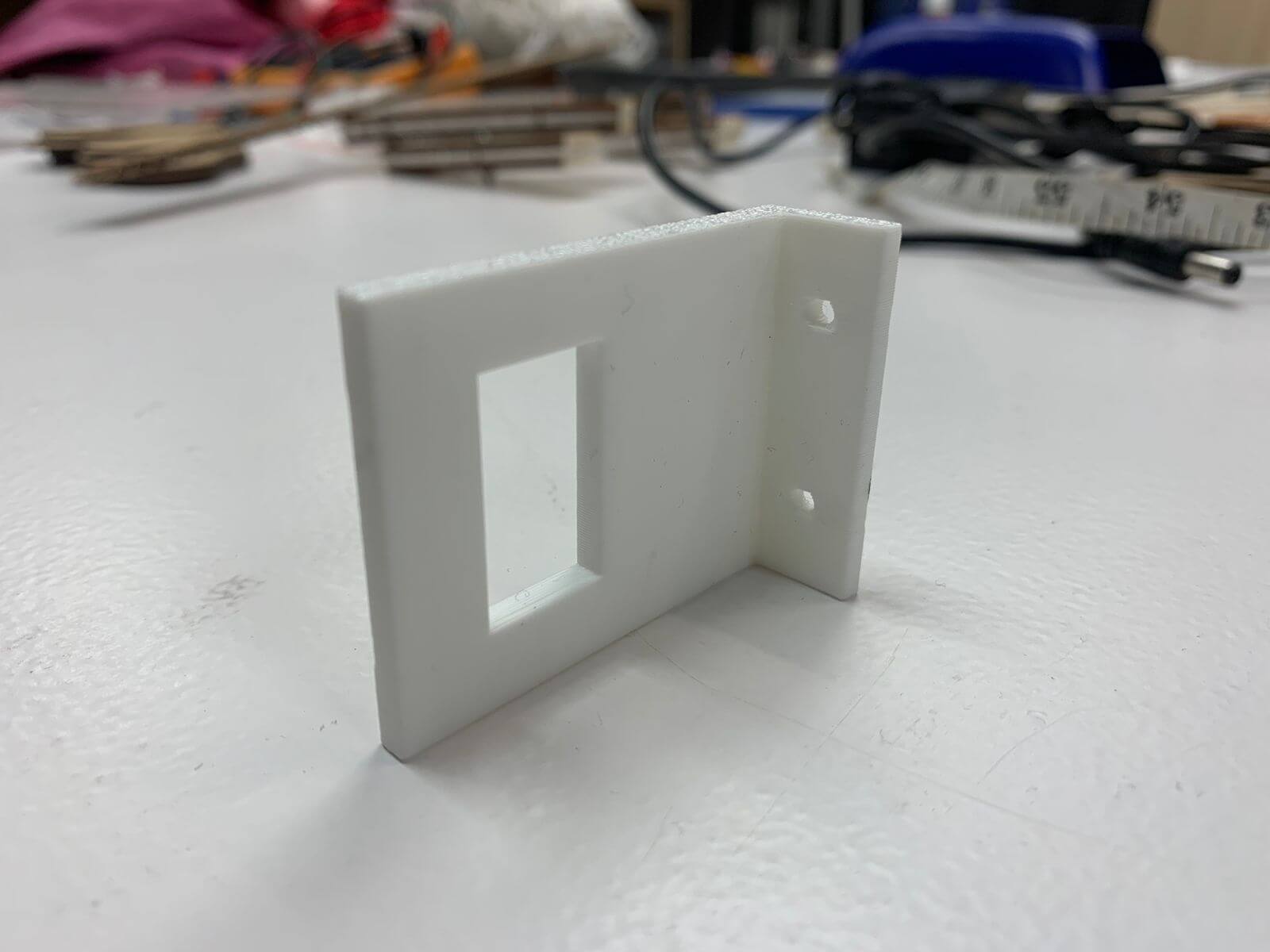
We needed also a few pieces to secure the servo motor to the base so the mechanism could be fixed and stable in one place, so we designed an "L" shaped support to hold the motors, making few variants, finally managing to get the right size optimizing material and time print, To print we used a Bambu X1 with it's software Bambu Studio



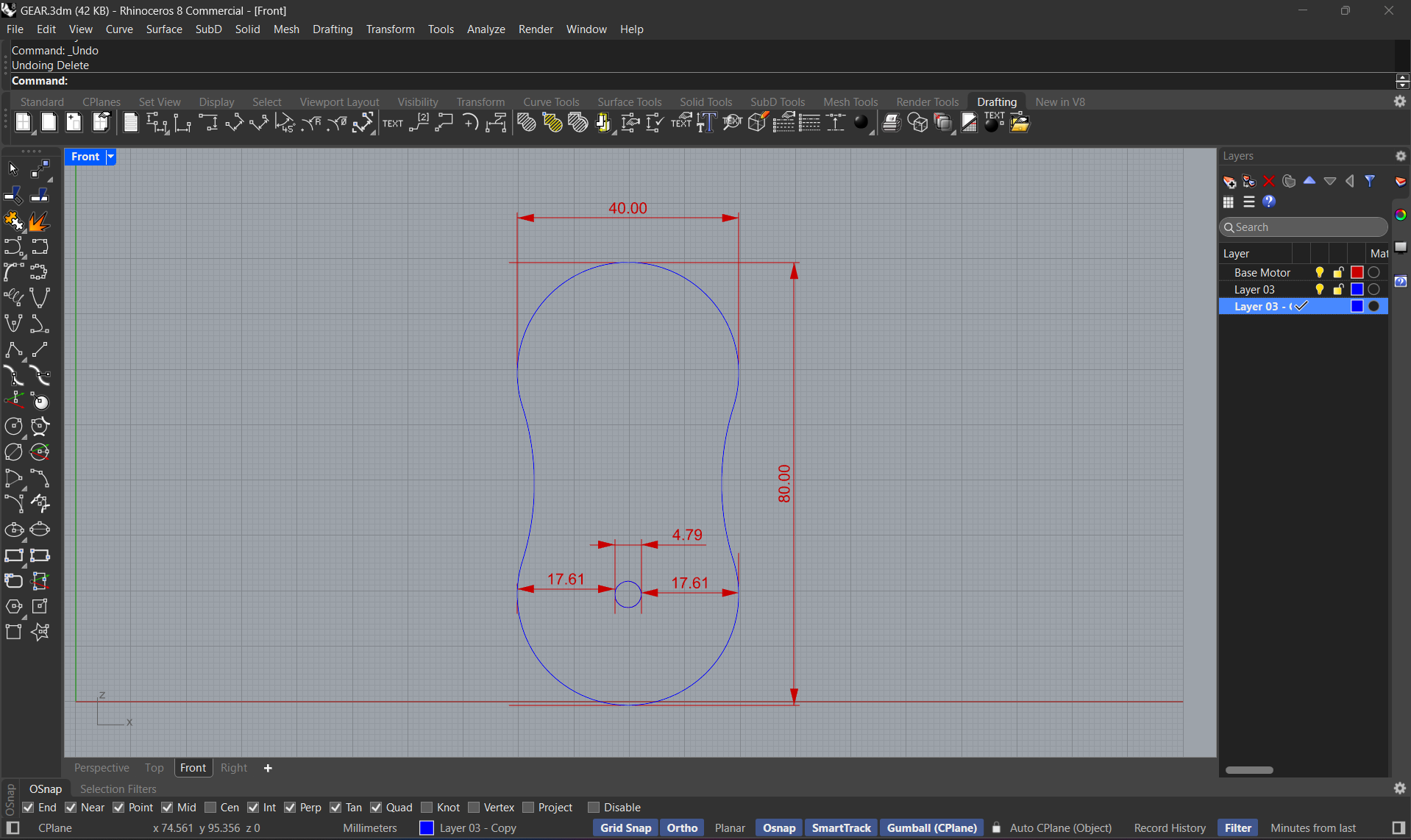
While someone was working on the cnc milling, another one in laser cutting, the third one (me) was working in the whole robotics of the machine. So we figured out a mechanism with a pear shaped laser cut piece that makes a push and release movement so the whole heddle goes automaticaclly up and then down:

Another important thing is that the board doesn't supply enough power to move the motors so we had to connect the board to this power supply

#include
// Create servo objects
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
Servo servo5;
// Servo pins
const int SERVO_PINS[] = {3, 5, 6, 9, 10};
void setup() {
// Attach servos to pins
servo1.attach(SERVO_PINS[0]);
servo2.attach(SERVO_PINS[1]);
servo3.attach(SERVO_PINS[2]);
servo4.attach(SERVO_PINS[3]);
servo5.attach(SERVO_PINS[4]);
// Initialize serial communication
Serial.begin(9600);
}
void loop() {
if (Serial.available() >= 5) { // Wait for 5 characters (one for each servo)
// Read control string for all servos
String controlStr = Serial.readStringUntil('\n');
// Control each servo based on its corresponding value
if (controlStr.length() >= 5) {
// Servo 1
servo1.write(controlStr.charAt(0) == '1' ? 90 : 0);
// Servo 2
servo2.write(controlStr.charAt(1) == '1' ? 90 : 0);
// Servo 3
servo3.write(controlStr.charAt(2) == '1' ? 90 : 0);
// Servo 4
servo4.write(controlStr.charAt(3) == '1' ? 90 : 0);
// Servo 5
servo5.write(controlStr.charAt(4) == '1' ? 90 : 0);
}
// Wait for 5 seconds before next command
delay(5000);
}
}
I really loved the challenge of this week. As my research revolves around neo-craftsmanship it was really cool to explore the reimagination of new tools that don't just simplify a task, a tool that doesn't forget the craft skill and offers new ways to innovate
With that said, I would have been great to have more time (or more people in the team) as some of my colleagues where not able to come everyday and the task of the loom was complicated on itself. It sucks a bit that the machine is not fully finished as we imagined it but the week was great.
